Project Lead: Apryle Craig, UW Department of Environmental & Forest Sciences PhD Candidate
eScience Liaison: Valentina Staneva
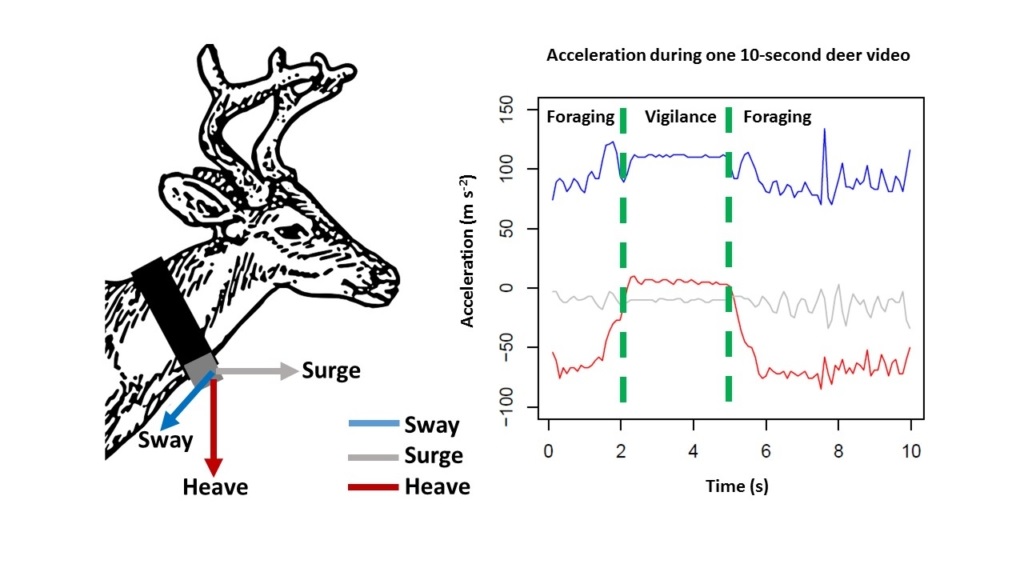
Animal behavior can provide insight into underlying processes that drive population and ecosystem dynamics. Accelerometers are small, inexpensive biologgers that can be used to identify animal behaviors remotely. Tri-axial accelerometers measure an animal’s acceleration in each of the three dimensions, frequently recording 10-100 measurements per second. These fine-scale data provide an opportunity to study nuanced behaviors, but have historically posed challenges for storage and analysis. However, animal behavior researchers have been slow to adopt accelerometers, perhaps owing to the rigorous calibration required to infer behavior from acceleration data. Calibration involves time-synchronizing behavioral observations with their associated accelerometer readings, which often necessitates the use of captive animals, surrogate species, or field observations on instrumented individuals. Alternatively, animal-borne video cameras may be used to directly calibrate or validate accelerometers. My goal is to use video from animal-borne cameras to assess the capacity of collar-mounted tri-axial accelerometers and machine learning to accurately classify foraging, vigilance, resting and traveling behavioral states in free-ranging deer. Deer were collared in areas of Washington that were recolonized by wolves and areas without wolves. I hope to use the resulting behavioral classifications to determine whether wolf recolonization is changing deer behavior.
Project Results
Historically, biologists watch a representative individual of the animal species move, either in a laboratory or in the field, and identify movements that could be associated with behaviors of interest. They then use these movements to calculate features from acceleration records that they believe would align with behaviors of interest. However, this process requires a priori assumptions about species-specific movement patterns associated with behaviors of interest. We chose an approach with a goal of minimizing the assumptions made about animal movements.
We started out by attempting to identify the simplest case: where the deer was engaging in just 1 behavior for the full 10-seconds of the video. So, we removed all data where the deer was engaging in multiple behaviors. Next, we converted the acceleration data from the time domain to frequency domain using a Fourier transformation. By doing so, our algorithm could categorize signals based on frequency and amplitude, while ignoring when the signal occurred in time.
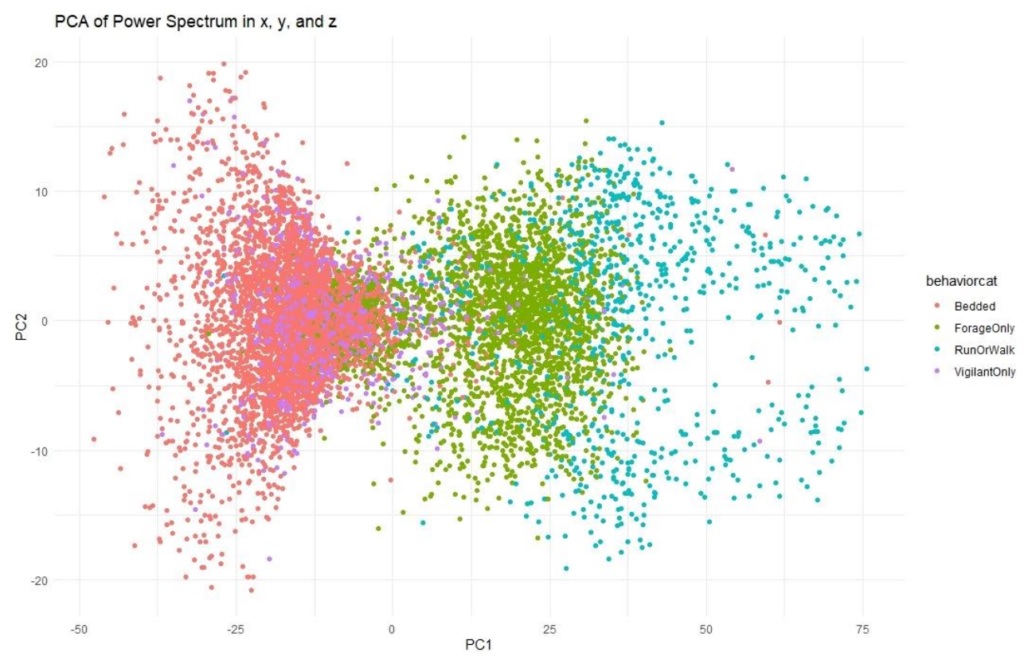
We split our labeled data into training, validation, and test datasets. We used principle component analysis on our training data to find the principle components of the transformed acceleration. We included the first four PCs in a logistic regression model to predict behaviors from the signal. We used validation data to determine how well our model could classify behaviors based on new acceleration data from deer it was trained on.
We created a confusion matrix with the model-predicted behaviors and the true behavior state, which was observed in the videos. The model correctly classified 3003 behaviors and incorrectly classified 130. In 127 of those incorrect classifications, the model predicted foraging when the deer was bedded. The model correctly classified 2071 behaviors of deer foraging. Most of the miscategorized foraging behaviors (92) were categorized as bedded. The model correctly classified 375 travelling deer behaviors and mislabeled 287 of the travelling videos as foraging. The model incorrectly labelled most of the vigilance as bedded. This was somewhat expected since the visual inspection of the principle component analysis showed a lot of overlap between bedded and vigilance.